Micro-robotic Cell Injection Training in a CAVE
DOI:
https://doi.org/10.18502/keg.v2i2.618Abstract
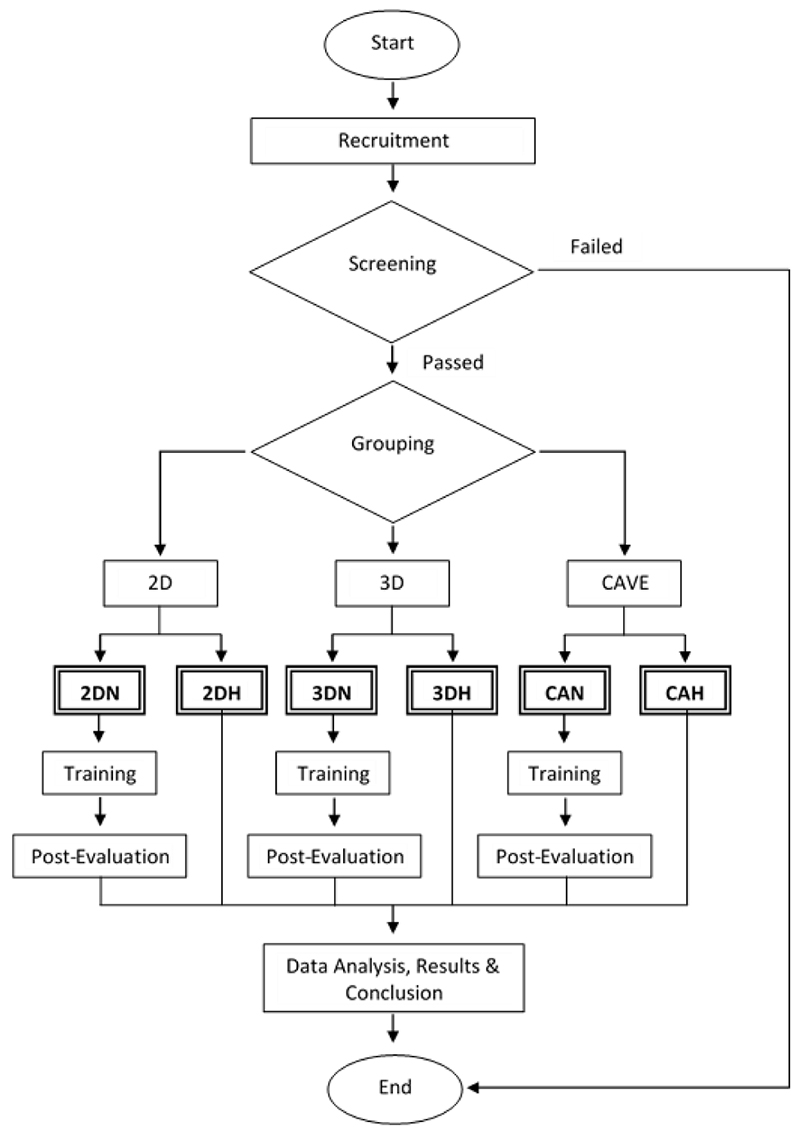
This paper focuses on the design of an evaluation made to a large-scale virtual reality micro-robotic cell injection training system. The aim of the evaluation is to empirically investigate the usability and effectiveness of three distinct display configurations and the input controller employed in the system. The data was gathered through a set of experiments with human participants. Participants’ performance against metrics such as success rate and magnitude of error was considered in the evaluation. For the experiments, participants were randomly divided into six equal sized groups where each group was provided with a specific combination of display configuration and haptic guidance mode. The participants performed ten injections and the time and position of the virtual micropipette tip were recorded. Data was analysed using descriptive statistics and performance comparison between groups was conducted. Additionally three groups also underwent two subsequent sessions, training and post-training, as a basis to evaluate the effectiveness of the training with haptic guidance by comparing participants’ performance before and after the training session. The implementation of the designed evaluation has contributed to the conclusions drawn which suggest the proposed large-scale virtual reality system as a feasible training tool for micro-robotic cell injection procedure, and recommendations for future work are proposed.
References
J. Kuncova, and P. Kallio, Challenges in capillary pressure microinjection, in Proceedings of the 26th Annual International Conference of the IEEE EMBS, 4998–5001, (2004).
D. S. Tan, D. Gergle, P. Scupelli, and R. Pausch, With similar visual angles, larger displays improve spatial performance, in Proceedings of the SIGCHI Conference on Human Factors in Computing Systems, Ft. Lauderdale, Florida, USA, 217–224, (2003).
S. Faroque, B. Horan, M. Mortimer, and M. Pangestu, Large-scale virtual reality micro-robotic cell injection training, in World Automation Congress, WAC2016, Puerto Rico, (2016).
D. University (2016) CADET Virtual Reality Lab. Available: http://www.deakin.edu.au/engineering/cadet/vr-lab.
Haption. Inca™6D. Available: http://www.haption.com/site/index.php/en/products-menuen/hardware-menu-en/29-inca-6d-content-en.
S. Faroque, B. Horan, H. Adam, and S. Thomas, Design of a virtual reality training system for microrobotic cell injection, in The International Design Technology Conference, DESTECH2015, Geelong, Australia, 185–190, (2015).
S. Faroque, B. Horan, and M. Joordens, Keyboard control method for virtual reality micro-robotic cell injection training, in 10th System of Systems Engineering Conference (SoSE), 2015, San Antonio, TX, 416–421, (2015).
N. A. Campbell, B. Williamson, and R. J. Heyden, Biology: Exploring life, Pearson Prentice Hall, Boston, MA, (2006).