3D Printing of a Photo-thermal Self-folding Actuator
DOI:
https://doi.org/10.18502/keg.v2i2.590Abstract
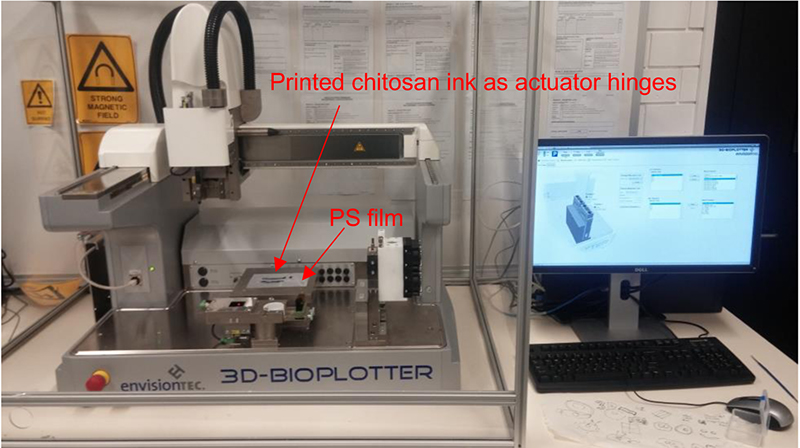
The demand for rapid and accurate fabrication of light-weight, biocompatible, and soft actuators in soft robotics has perused researchers to design and fabricate such products by rapid manufacturing techniques. The self-folding origami structure is a type of soft actuator that has applications in micro electro mechanical systems, soft electronics, and biomedical devices. 3-dimentional (3D) printing is a current manufacturing process that can be used for fabrication of involute soft self-folding products by means of shape memory polymer materials. This paper presents, for the first time, a method for developing a photo thermal self-folding soft actuator using a 3D bioplotter. Easily accessible and inexpensive pre-strained polystyrene is opted for the backbone of actuator. The polystyrene film (PS) is then structured in a hand shape gripper. Chitosan hydrogel and carbon black ink were combined for printing active hinges on the hand gripper. Various active hinges with different widths and thicknesses were printed on the hand gripper using the 3D bioplotter. An infra-red (IR) heating lamp was placed at a reasonable distance to emit IR light uniformly on the hand gripper. The temperature distribution on the hand gripper was observed using a thermographic camera and the bending angles of the samples were recorded by a video camera. It was observed that the bending angles of the hand fingers depend on factors such as the intensity of the heat flux generated by the IR light intensity, distance, onset temperature, geometry of the fingers such as width and thickness, and area of the hinges.References
D. Davis, R. Mailen, J. Genzer, and M. D. Dickey, Self-folding of polymer sheets using microwaves and graphene ink, RSC Advances, 5, 89254–89261, (2015), 10.1039/C5RA16431A.
D. Deng, and Y. Chen, Origami-based self-folding structure design and fabrication using projection based
stereolithography, Journal of Mechanical Design, 137, 021701, (2015), 10.1115/1.4029066.
K. Iwaso, Y. Takashima, and A. Harada, Fast response dry-type artificial molecular muscles with [c2] daisy chains, Nature chemistry, (2016).
D. Kim, H. S. Lee, and J. Yoon, Highly bendable bilayer-type photo-actuators comprising of reduced graphene oxide dispersed in hydrogels, Scientific reports, 6, (2016).
J. Kimionis, A. Georgiadis, M. Isakov, H. J. QI, and M. M. Tentzeris, 3D/inkjet-printed origami antennas for multi-direction RF harvesting. 2015 IEEE MTT-S International Microwave Symposium, 2015a. IEEE, 1–4.
J. Kimionis, M. ISAKOV, B. S. KOH, A. Georgiadis, and M. M. Tentzeris, 3D-Printed Origami Packaging With
Inkjet-Printed Antennas for RF Harvesting Sensors, IEEE Transactions on Microwave Theory and Techniques, 63, 4521–4532, (2015b), 10.1109/TMTT.2015.2494580.
J.-S. Koh, S.-R. Kim, and K.-J. Cho, Self-folding origami using torsion shape memory alloy wire actuators. ASME 2014 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference. 2014 American Society of Mechanical Engineers V05BT08A043–V05BT08A043.
A. D. Lantada, A. De Blas Romero, and E. C. Tanarro, Micro-vascular shape-memory polymer actuators with complex geometries obtained by laser stereolithography, Smart Materials and Structures, 25, 065018, (2016), 10.1088/0964-1726/25/6/065018.
Y. Lee, H. Lee, T. Hwang, J.-G. Lee, and M. Cho, Sequential Folding using Light-activated Polystyrene Sheet, Scientific reports, 5, (2015).
Y. Liu, J. K. Boyles, J. Genzer, and M. D. Dickey, Self-folding of polymer sheets using local light absorption, Soft Matter, 8, 1764–1769, (2012), 10.1039/C1SM06564E.
Y. Liu, M. Miskiewicz, M. J. Escuti, J. Genzer, and M. D. Dickey, Three-dimensional folding of prestrained polymer sheets via absorption of laser light, Journal of Applied Physics, 115, 204911, (2014), 10.1063/1.4880160.
Y. Mao, Z. Ding, C. Yuan, S. AI, M. Isakov, J. Wu, T. Wang, M. L. Dunn, and H. J. Qi, 3D Printed Reversible Shape Changing Components with Stimuli Responsive Materials, Scientific Reports, 6, (2016).
X. Mu, N. Sowan, J. A. Tumbic, C. N. Bowman, P. T. Mather, and H. J. Qi, Photo-induced bending in a lightactivated polymer laminated composite, Soft Matter, 11, 2673–82, (2015), 10.1039/C4SM02592J.
C. D. Onal, M. T. Tolley, R. J. Wood, and D. Rus, Origami-inspired printed robots, IEEE/ASME Transactions on
Mechatronics, 20, 2214–2221, (2015), 10.1109/TMECH.2014.2369854.
E. A. Peraza-Hernandez, D. J. Hartl, R. J. Malak, Jr, and D. C. Lagoudas, Origami-inspired active structures: a synthesis and review, Smart Materials and Structures, 23, 094001, (2014), 10.1088/0964- 1726/23/9/094001.
A. Piqué, S. Mathews, A. Birnbaum, and N. Charipar, Microfabricating 3D structures by laser origami. DTIC
Document., (2011).
B. Shin, S. M. Felton, M. T. Tolley, and R. J. Wood, Self-assembling sensors for printable machines. 2014 IEEE International Conference on Robotics and Automation (ICRA), IEEE, 4417–4422, (2014).
J. L. Silverberg, J.-H. Na, A. A. Evans, B. Liu, T. C. Hull, C. D. Santangelo, R. J. Lang, R. C. Hayward, and I. Cohen, Origami structures with a critical transition to bistability arising from hidden degrees of freedom, Nature materials, 14, 389–393, (2015), 10.1038/nmat4232.
H. Zhang, H. Xia, and Y. Zhao, Light-controlled complex deformation and motion of shape-memory polymers using a temperature gradient, ACS Macro Letters, 3, 940–943, (2014), 10.1021/mz500520b.
X.-M. Zhao, Y. XIA, O. J. Schueller, D. Qin, and G. M. Whitesides, Fabrication of microstructures using shrinkable polystyrene films, Sensors and Actuators A: Physical, 65, 209–217, (1998), 10.1016/S0924- 4247(97)01692-0.
A. Zolfagharian, A. Z. Kouzani, S. Y. Khoo, A. A. A. Moghadam, I. Gibson, and A. Kaynak, Evolution of 3D printed soft actuators, Sensors and Actuators A: Physical, 250, 258–272, (2016), 10.1016/j.sna.2016.09.028.